大変多くの参加申し込みをいただきまして、誠にありがとうございました。
おかげ様で、大盛況のうちに終了いたしました。
また、ご参加いただきました皆様、長時間ご清聴いただきまして誠に
ありがとうございました。
今後とも皆様のお役に立ちますよう、最善を尽くしてまいります。
*******************************************************************
なぜ今、シナリオベース開発が必要なのか?
- 自動運転・ADAS開発の高度化に伴い → 検証シナリオの爆発的増加
- ツール間でのデータ連携が困難 → シナリオ資産が再利用できない
- 制御モデルと環境モデルが分断 → 評価効率が低下
これらの課題を解決するために、OpenDRIVE / OpenSCENARIOに準拠したデータを
運用することが重要になります。
本ウェビナーでは、路面モデルやCarSimの分野に知見を持つBlueke株式会社と、
Simulinkおよび制御モデル開発に強みを持つネオリウム・テクノロジー株式会社の2社が
協力し、RoadRunnerで生成したOpenDRIVE/OpenSCENARIOを活用したシナリオ生成
から、MATLAB/Simulink/CarSimによる制御・プラント統合シミュレーションまでの
一連の流れを実例を交えて分かりやすくご紹介いたします。
![]()
| 日 時 |
2026年 5月 14日(木) 15:00~16:00 |
|
開催形式 |
Microsoft Teams Webinar(オンライン開催) |
|
参 加 費 |
無料(事前登録制) |
|
登録方法 |
「Teams Webinar登録ページ」よりお申し込みください。 【受付終了】 ※ご登録いただいた方には登録承認後、Teams Webinarの招待URLが 送付されます。 |

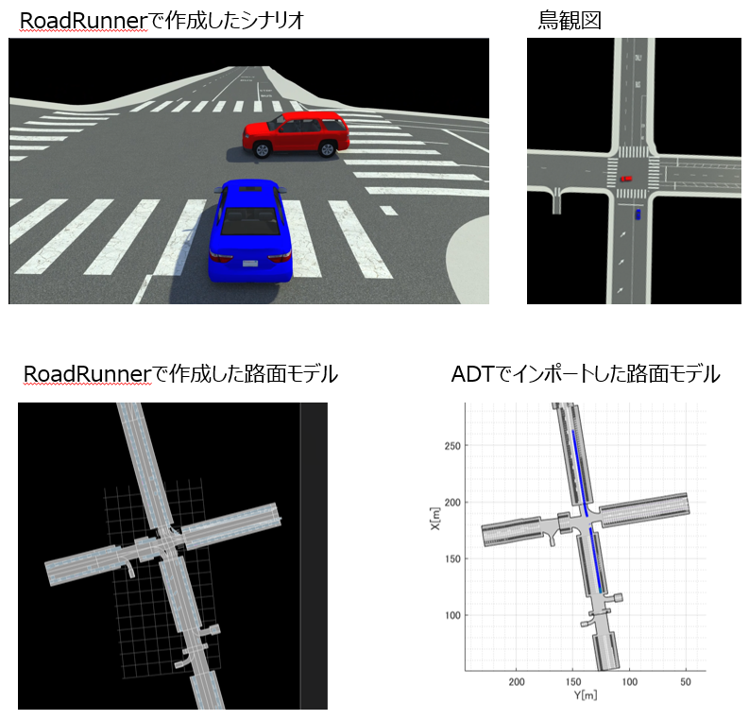
✓ OpenDRIVE / OpenSCENARIOの基礎と実装方法
✓ RoadRunnerによるシナリオ作成フロー
✓ CarSim / ADT / esmini とOpenSCENARIOを用いたシミュレーション連携
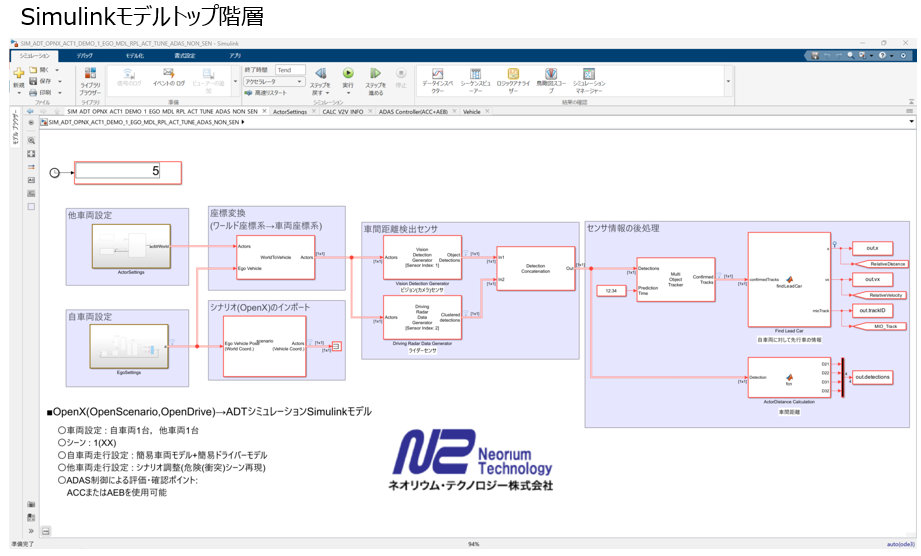
✓ MATLAB/SimulinkでのOpenSCENARIOシナリオ実装と制御・プラント統合方法
✓ シナリオベース開発の実践的ワークフロー